|
2-3-2, or sometimes called 3-2-3 is the Holy Grail of Droid building. A basic function of the fictional R2D2 in the 1977 original Star Wars, moving from two to three legs and the reverse turned out to be a practical nightmare for the prop builders on the movie. The prop Droids built for the movie suffered break down after break down, and the many planned scenes featuring these transitions were cut down to three two to three leg transitions, both with quick cuts after the transition and one partially shown three to two leg transition. In the intervening years, the 2-3-2 transitions were only performed by a digital version of R2. None of this has dissuaded club builders from attempting to build a working version. Until recently, these Droids have all been aluminum, but I wondered, could it be done in a styrene or wood droid?
|
Man...I would like to say that the 2-3-2 system in my R2 was completely my idea...but it isn't. Builder Andrew Pierce from Australia was the first builder to demonstrate that a Droid built of styrene could perform the two leg to three and back to two transition. From the moment I saw his video on Astromech.net, I KNEW my Droid needed to accomplish it. That said, I can say that my implementation of Andrew's idea is completely my own. I must thank Andrew for all his generous help during my building process.
But let's back up a bit. After completing R2's dome (minus paint), I decided to dive in and begin his body. I just couldn't justify the expense of building an aluminum frame so I looked into styrene and wood builds. Even though I was an experienced wood worker, I just couldn't build a robot from wood. Somehow it just didn't seem right, so styrene it was. I'd never built anything from sheet styrene, so I decided to purchase a basic frame kit from Frank Pirz, another builder who had offered his CNC cut frame parts to other builders who didn't have the equipment he did.
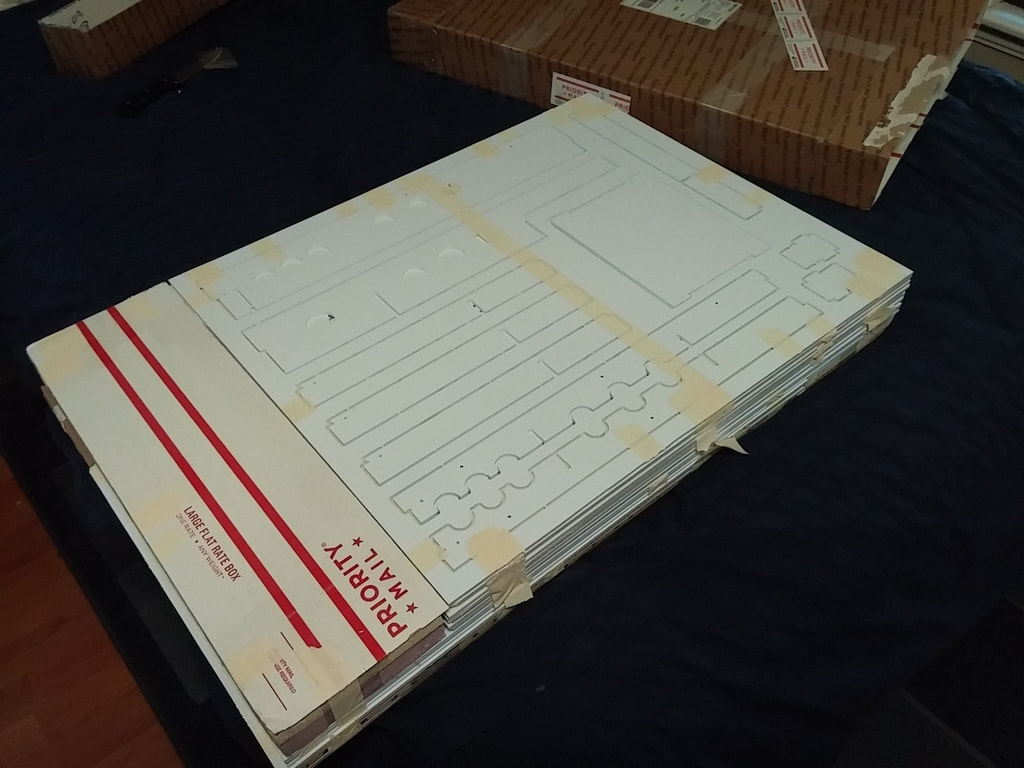
Frank's kit was fantastic! I had no idea that one could cut such beautiful parts in your garage... and it got me thinking. Could I do that? Could I design and cut my own parts? About this time, I saw the video of Andrew Pierce's 2-3-2 capable styrene Droid. I was totally amazed. A plastic Droid that could do what the movie Droids couldn't do in 1977? I had to have one. But Andrew was a pioneer. No one else had done it and while he was generous with his designs, concepts and advice, this wasn't something I could just download and cut. I had to design it myself. I looked at Frank's excellent frame which was still in it's packaging, and thought...could I adapt his frame for 2-3-2? I decided to try.
I was lucky enough while on a job to find a used hobby X-carve CNC machine on Craigslist. It was too small to cut an entire frame, but it was big enough to cut new parts to modify Frank's frame.
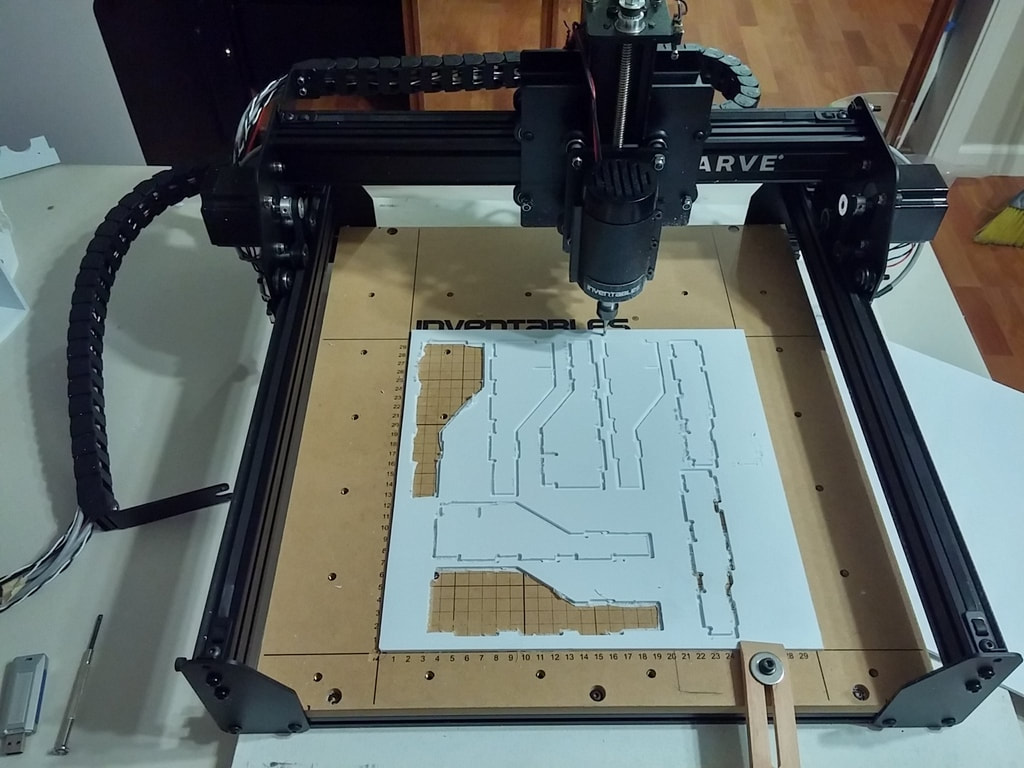
Learning how to use a CNC (Computer Numeric Control) router is a big job. The folks at Inventables, the makers of the X-carve, really make it easy. At first I was etching names in picture frames as practice, but soon, I was able to create parts in the computer and cut them on the machine!
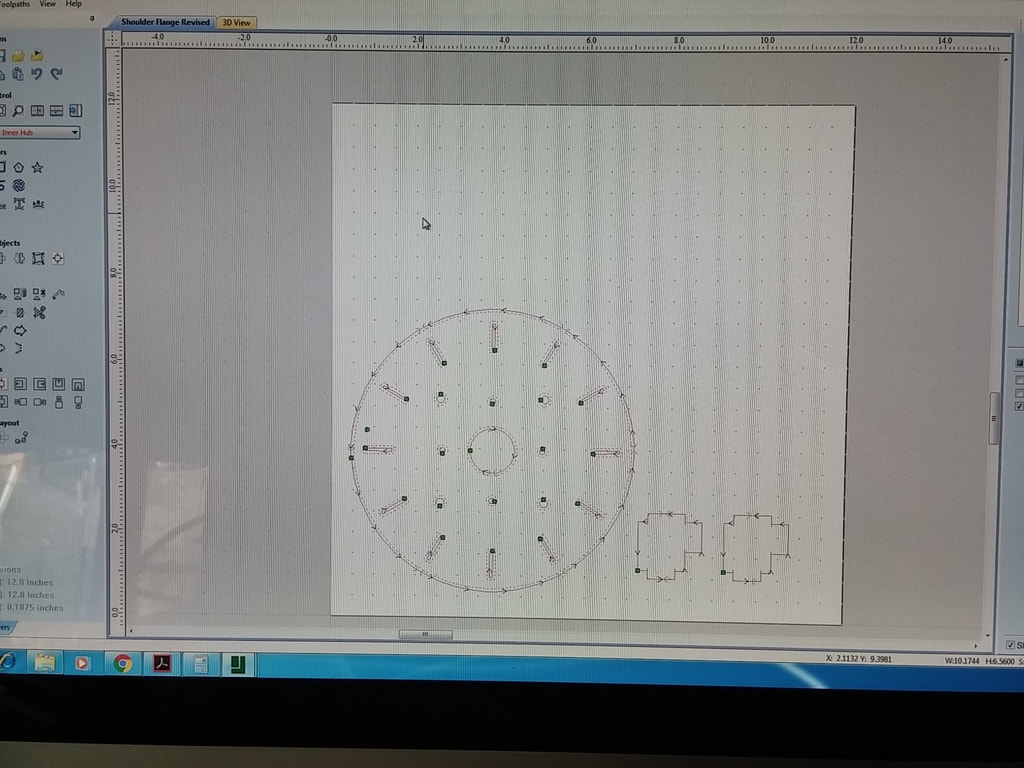
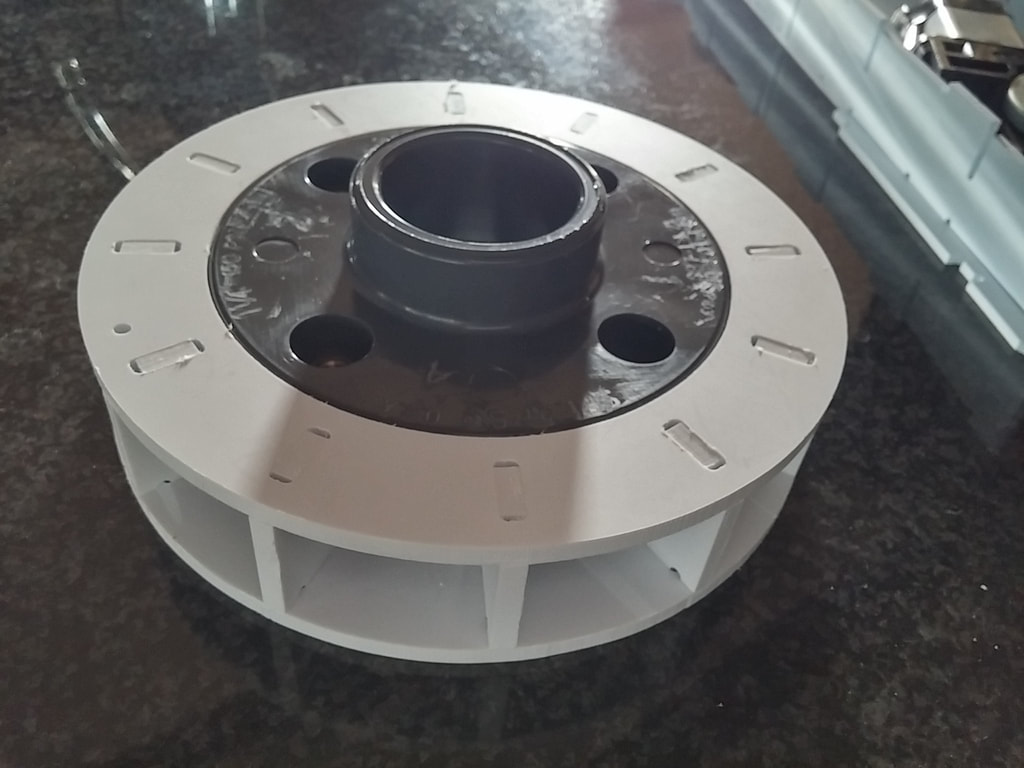
I decided to start small by redesigning one of Frank's parts. He generously offers the files for his parts for free on his website. It was easy to download the parts files and open them up in the computer, but learning how to use the software to modify the plans was a process. I needed to start with something simple. The flanges between R2's body and the legs fit that bill. Following Andrew's lead, the flanges would need to integrate some PVC pipe parts that would give them the strength needed. I first started by making several prototypes of the flanges until I got the parts to fit correctly. It was really a great feeling when it finally fit.
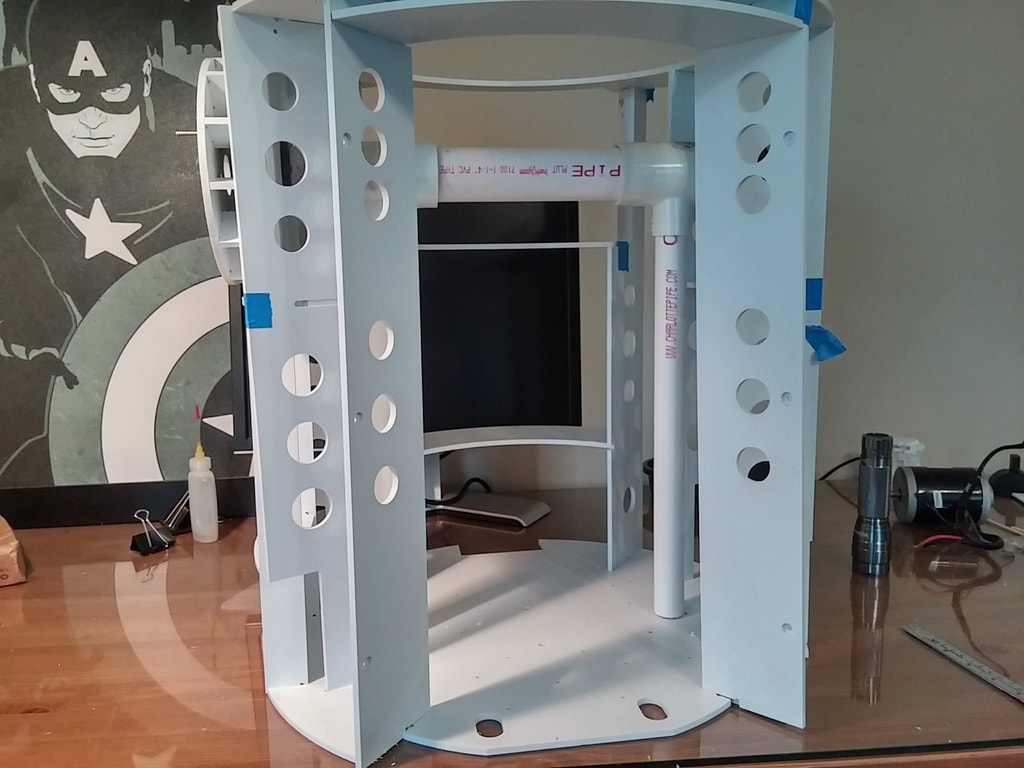
To make R2's outer legs move from the two to three leg position, I needed to provide stops in the frame so the legs wouldn't turn too far. I designed new frame parts that would fit into the existing frame that had stops built in.

The axle that connected the two flanges would also support a slide that moved the center leg up and down. These PVC parts functioned well but were eventually replaced with and aluminum axle and steel bearing slides to accommodate the Droids increased weight.

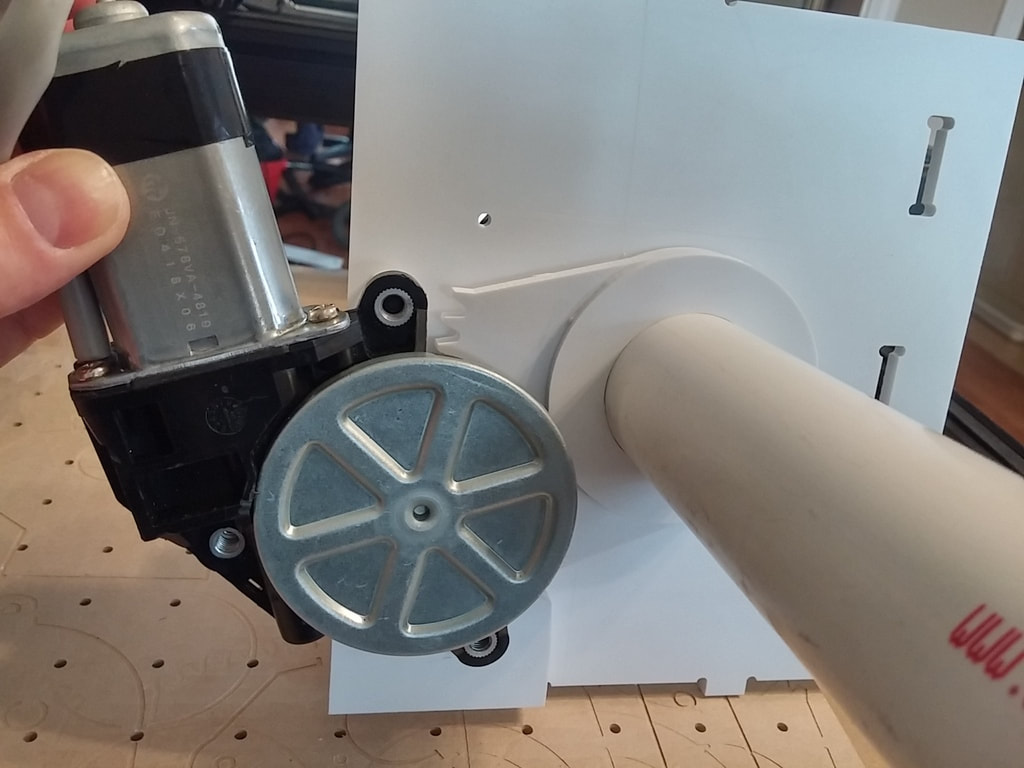
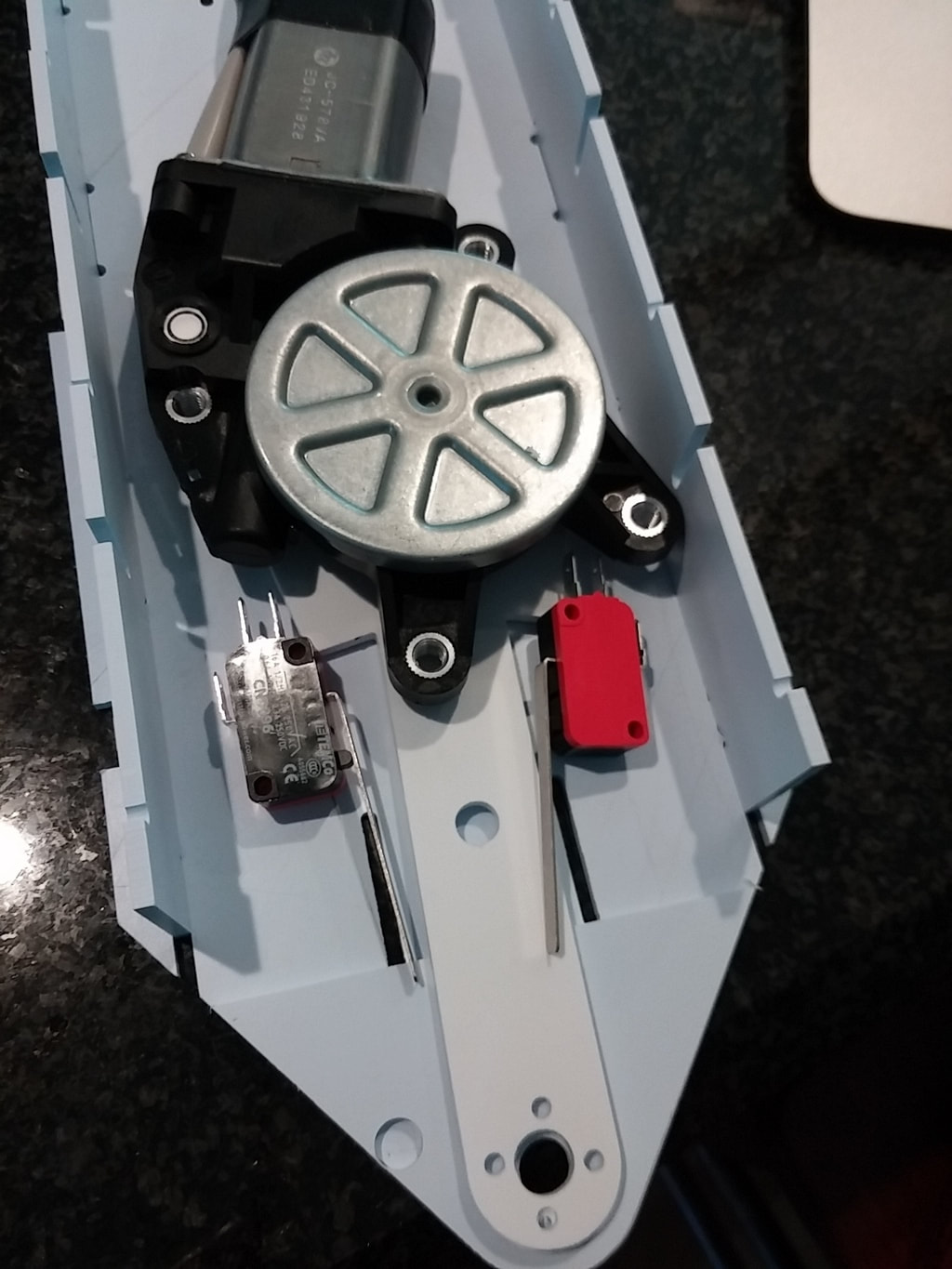
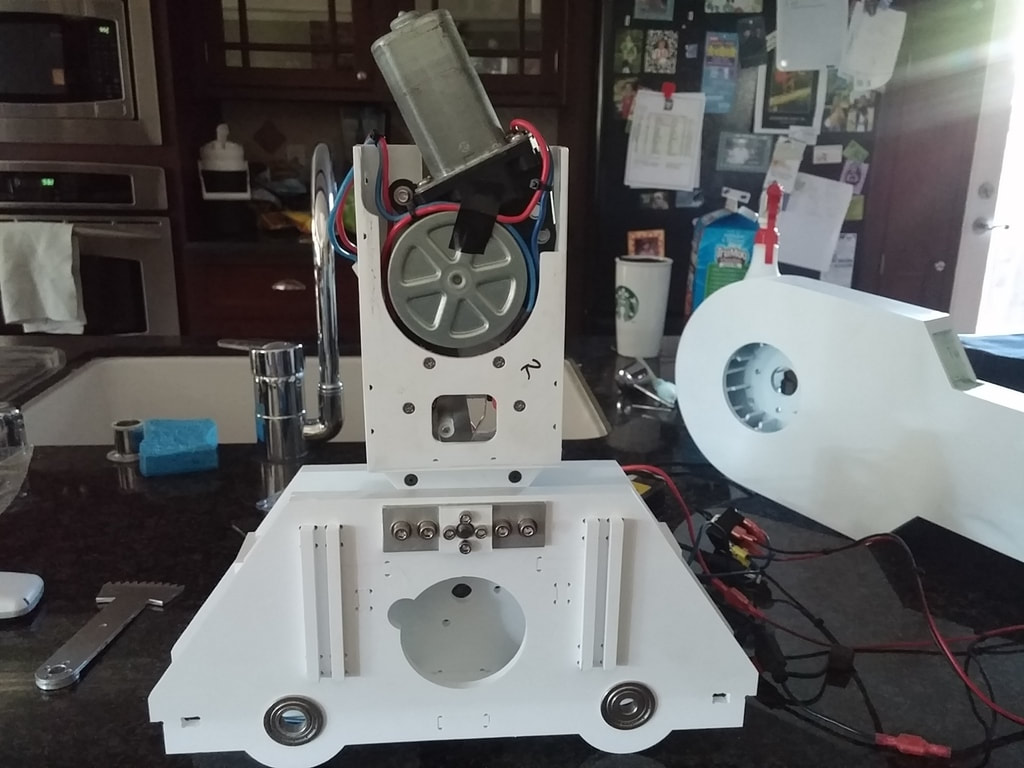
The frame side plates also support the motor that drives the movement of the outer legs and body. The motor is an automotive window lift motor. The gear in this photo was a plastic prototype. The actual gear was cut from aluminum.

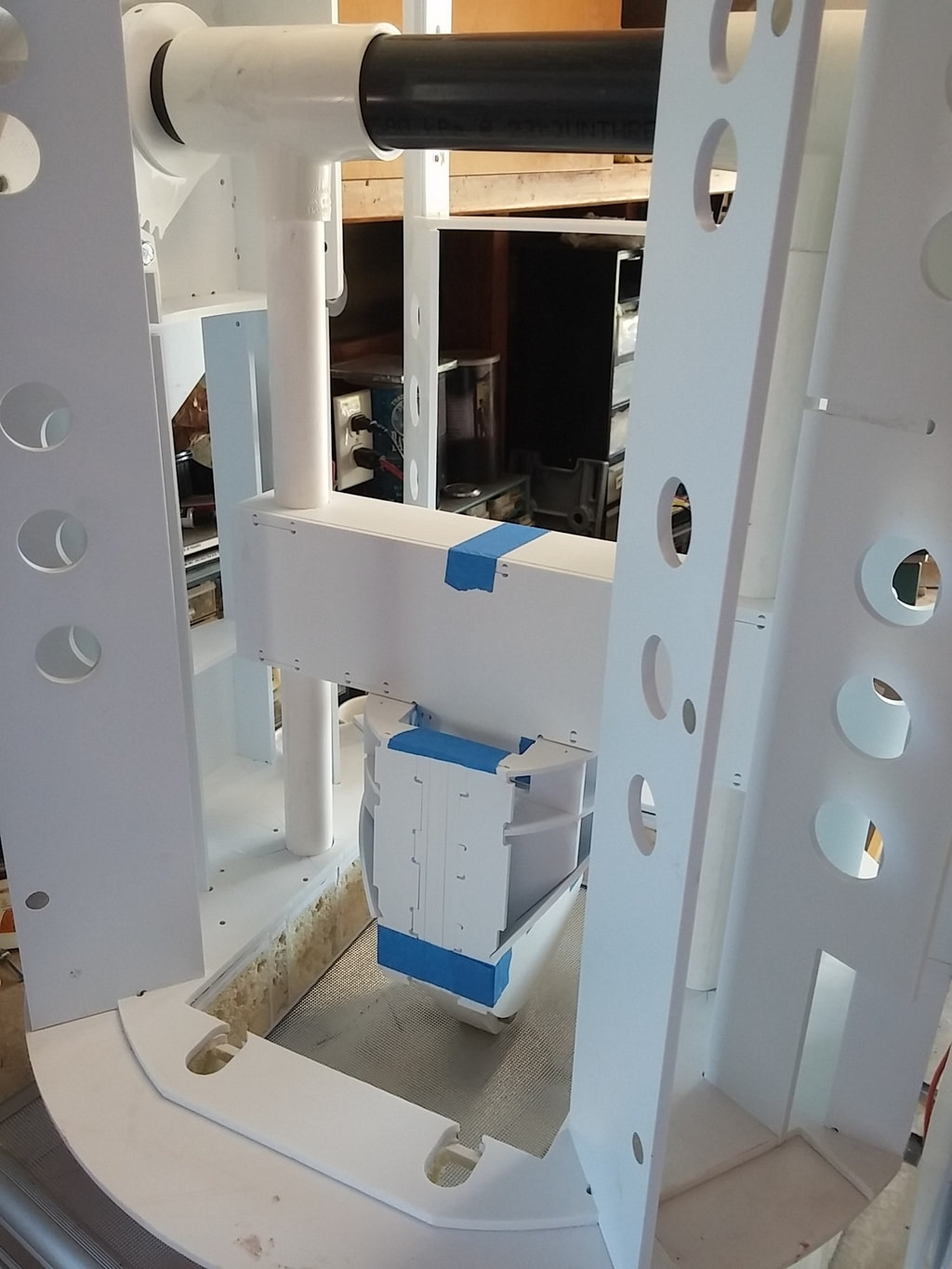
Here's the prototype slides mocked up inside the frame. The bottom plate of the frame had to be cut to let the center leg pass through it.
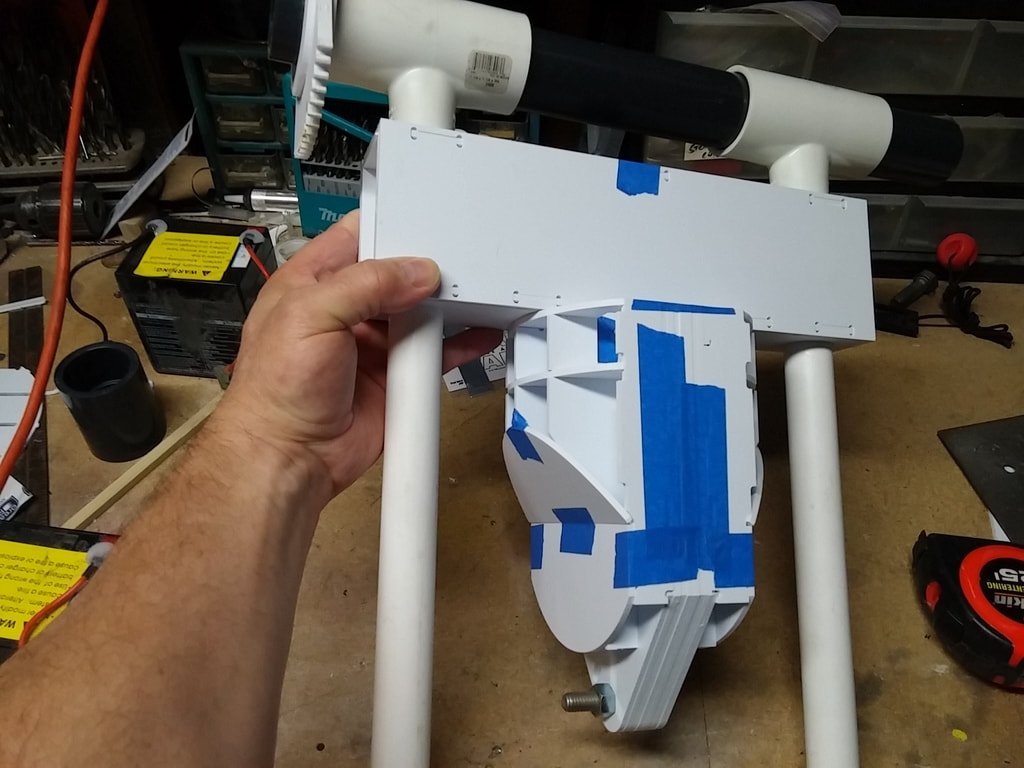
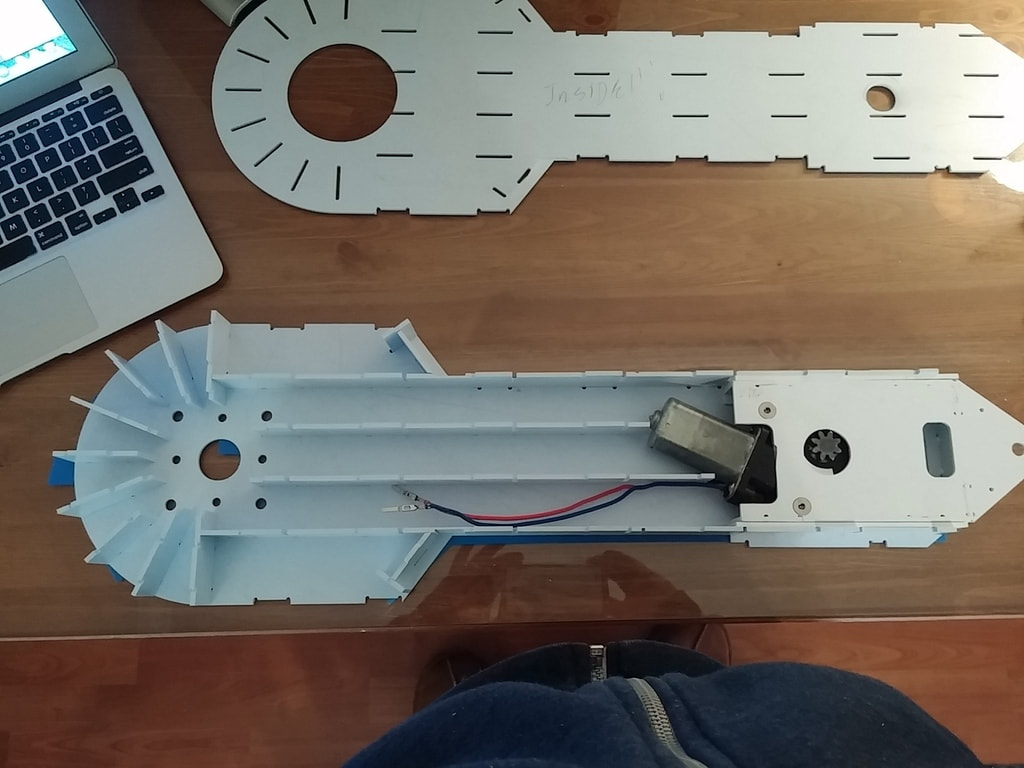
After successfully designing the frame parts, I had the confidence to design a center leg that would slide up and down. Here's an early version mocked up. Designing something like this requires a lot of experimentation and trial and error. I think I made three of these center legs before I settled on the final design!
Here you can see the hole cut in the bottom of the frame that the leg will eventually pass through.
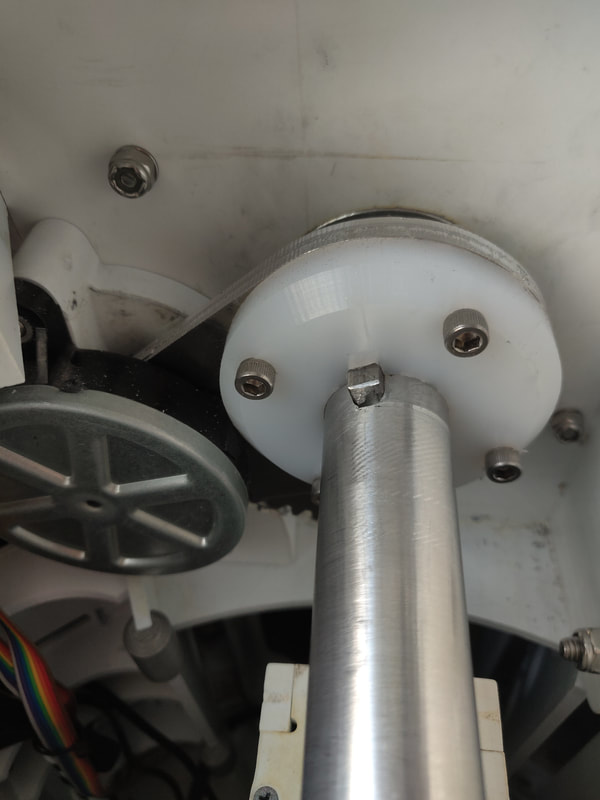
A single motor pulls that center ankle up with an articulated linkage that follows a circular track. The linkage shown in a plastic mock up. The final version was made of steel.
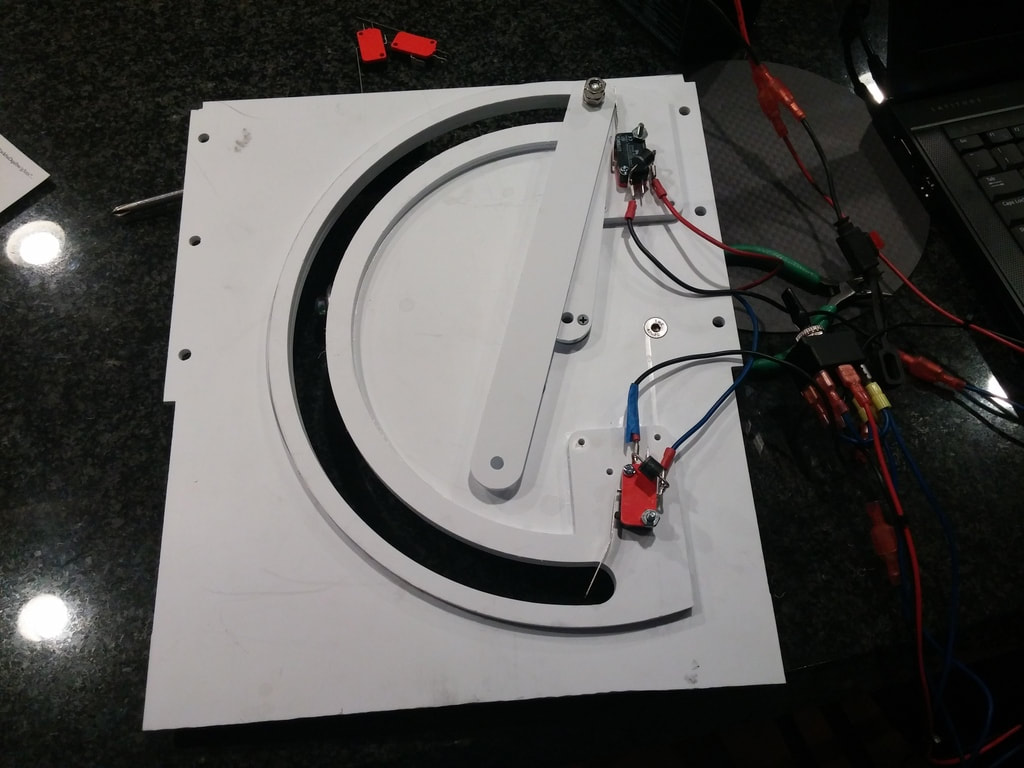
The track is bolted to the frame.
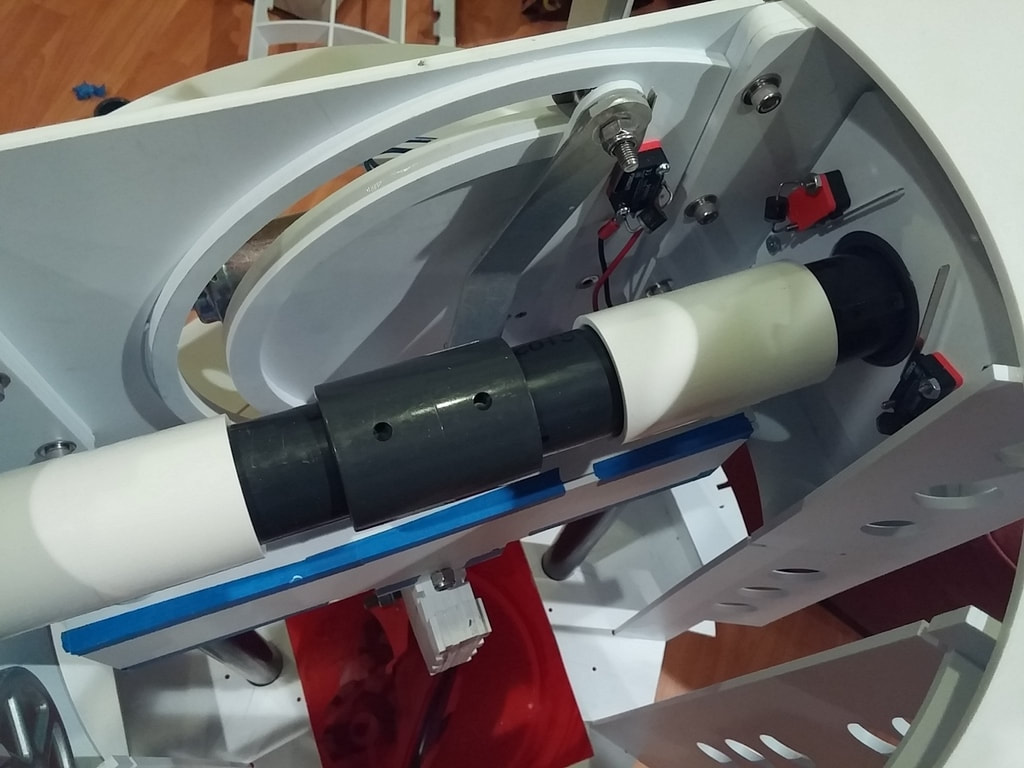
Here's a quick video showing how the center leg lift mechanism works. By this time, the PVC slides had been replaced by linear rods and bearings, but the main axle holding it is still PVC. Later, I switched over to an aluminum axle.
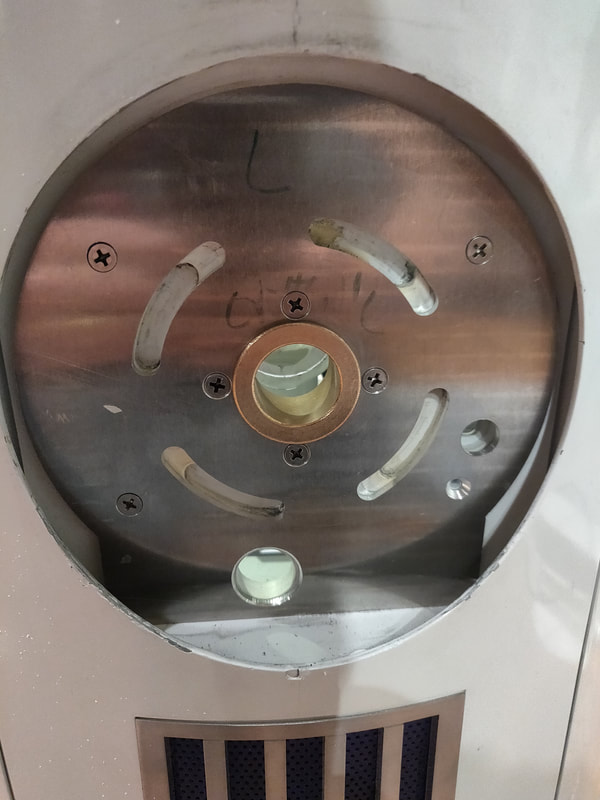
The ankles of the outer legs also need to change their angle when the Droid goes from three to two legs and vice versa. This is accomplished by yet another set of motors. The motor moves along gears that are fixed in place on the feet. The ankle gears are probably the most complicated part I've ever cut from aluminum.

The gear is fixed to the foot drive using a keyed part. The motor in the ankle walks over the stationary gear, bringing the entire leg with it. This can be a little hard to picture in your head, so there's a video a bit further down the page.

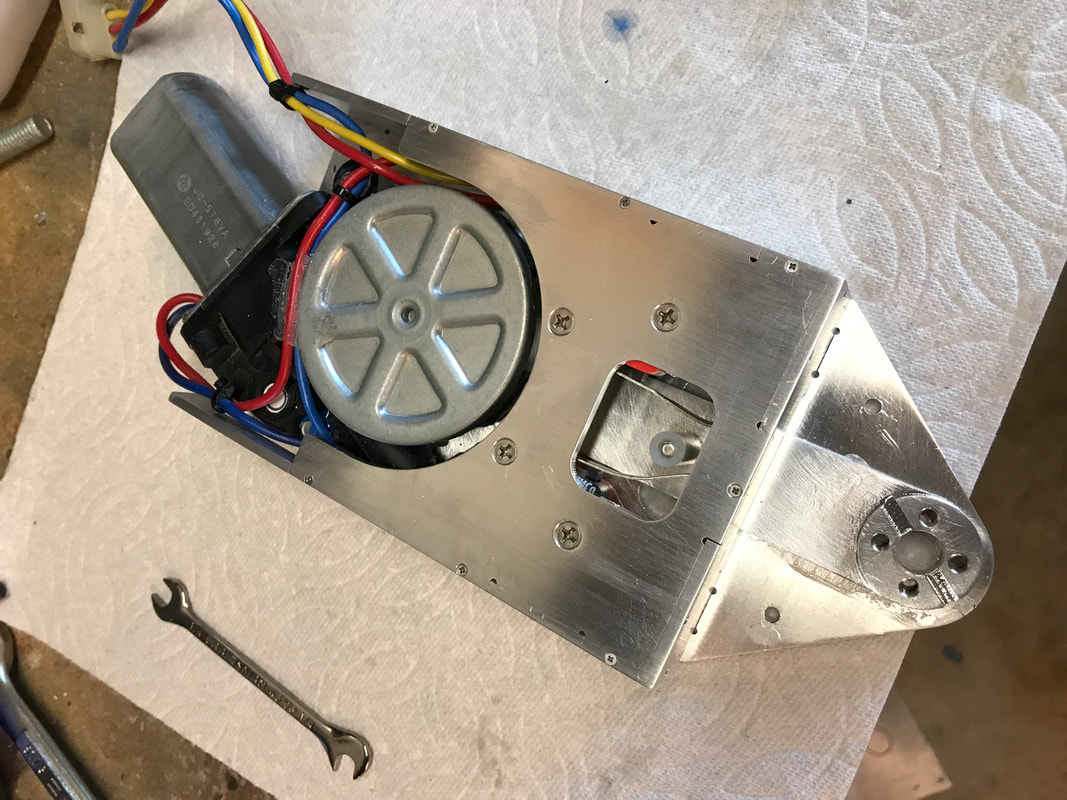
The ankle motors (more automotive window motors) are housed in a custom gear box in the leg. Here's a picture from when I was trying to get everything to fit in the leg. I wanted to have the gearboxes be removable so I could service them. This is another part that went through many revisions and tests.
The original gear boxes were made of styrene and lasted for 2 years, but eventually as I got better at cutting aluminum on my CNC, I decided to cut aluminum versions for strength reasons.
In this mock up, you can see how the motor sits inside the gear box. The gear is mounted to the foot drive at an angle. It's just barely visible in the window of the gear box.
The gear box slides in the end of the leg from the bottom.
Here's a video demo of how the leg moves.
The transition sequence began as a purely electromechanical one. Flipping a switch caused the first set of motors to move (the shoulder and the center leg), and when the center leg reached the bottom of it's travel, it triggered the ankle motors to turn. Amazingly, this all worked! Even controlled by simple electromechanical means, meaning no computer control, my Droid was able to do the 2-3-2 transition in a stable manner. Over the years many of these components have been upgraded as his weight grew, and recently I've switched over his 2-3-2 system to micro processor control which gives me much greater control over the system.
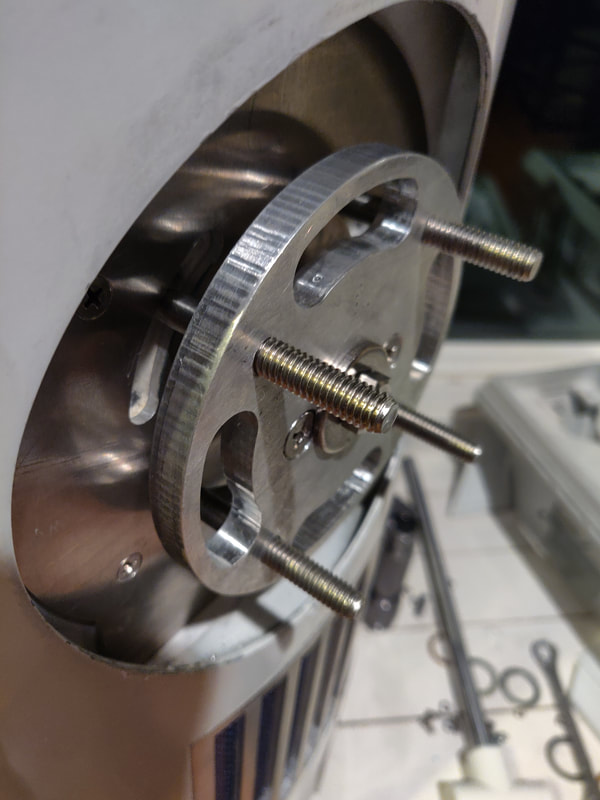
The original PVC shoulder bar and flanges are now made of aluminum.
Even the stops that keep his legs from moving too far are now aluminum.
As are the flanges that the legs bolt to. These parts were all custom designed by me and machined by me or my friend Travis. If you'd told me 3 years ago that I'd be designing and machining custom parts like this, I would have said you were crazy!
All that pretty aluminum is covered up by a plastic cover that goes between the body and the leg. This cover makes me think of the very first part I drew up when I got my CNC!

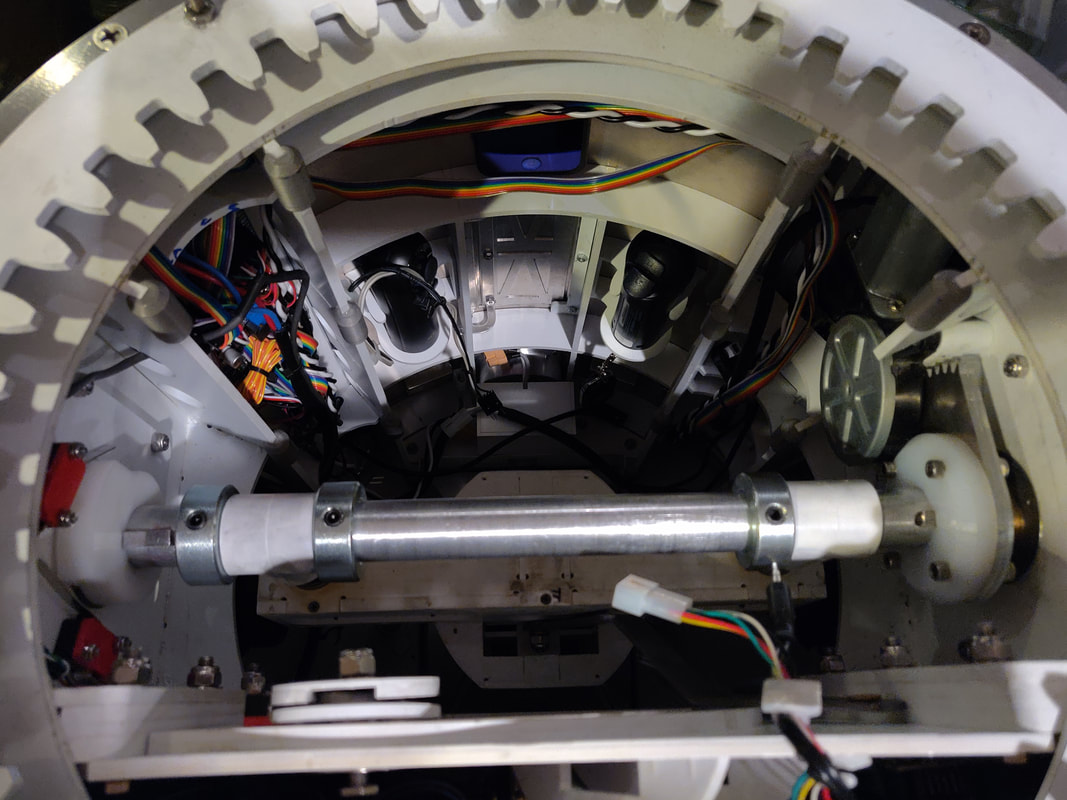
Heres a shot of the interior with the main electronics board removed.
The 2-3-2 operation is now handled by an additional Arduino Mega running a program I wrote, and four 40A motor controllers.

The 2-3-2 system has a LOT of wiring.

All that work results in a smooth transition, and in fact, more than one type of transition. R2 can do the film accurate "jump" transition, and also a smoother "splits" transition.
But having computer control over all of these motors enables R2 to also do other things besides the 2-3-2 transition. How about being able to look even small children in the eye?
Or how about being able to lean forward to get a better look at a kid who may be in a hospital bed?
As time goes by, I'm sure I'll think of other ways to take advantage of this kind of control.