|
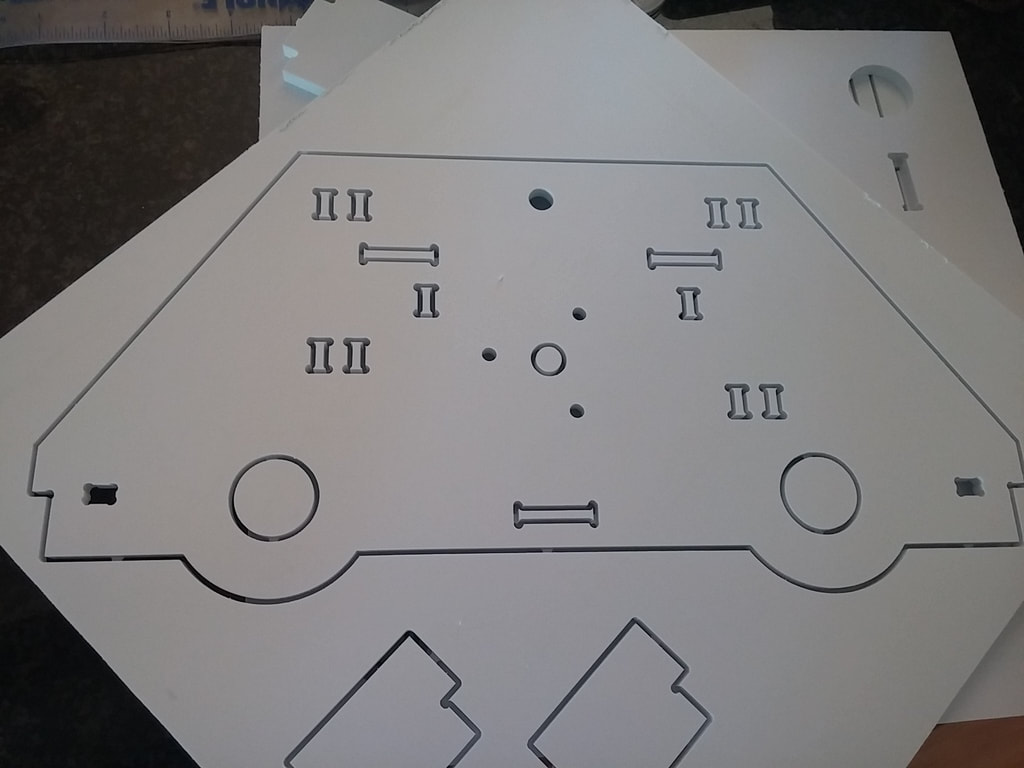
How do you make a Droid go? Well with motors of course! In my case, used electric scooter motors, including one out of my daughters' old Razor scooter. While I didn't purchase them, Frank offers a styrene 4WD scooter drive for the club. While interesting, I wanted something simpler and I wanted to integrate a newly available omni wheel that Vex Robotics had released. Most Droid drives made during this period used casters in the back, but I needed the stability of two full sized wheels for my 2-3-2 to operate correctly, so I decided to create my own drive based vaguely on Frank's design. The first version was built in plastic.
|
I used these drives with a few adjustments in gear ratio for almost 3 years.

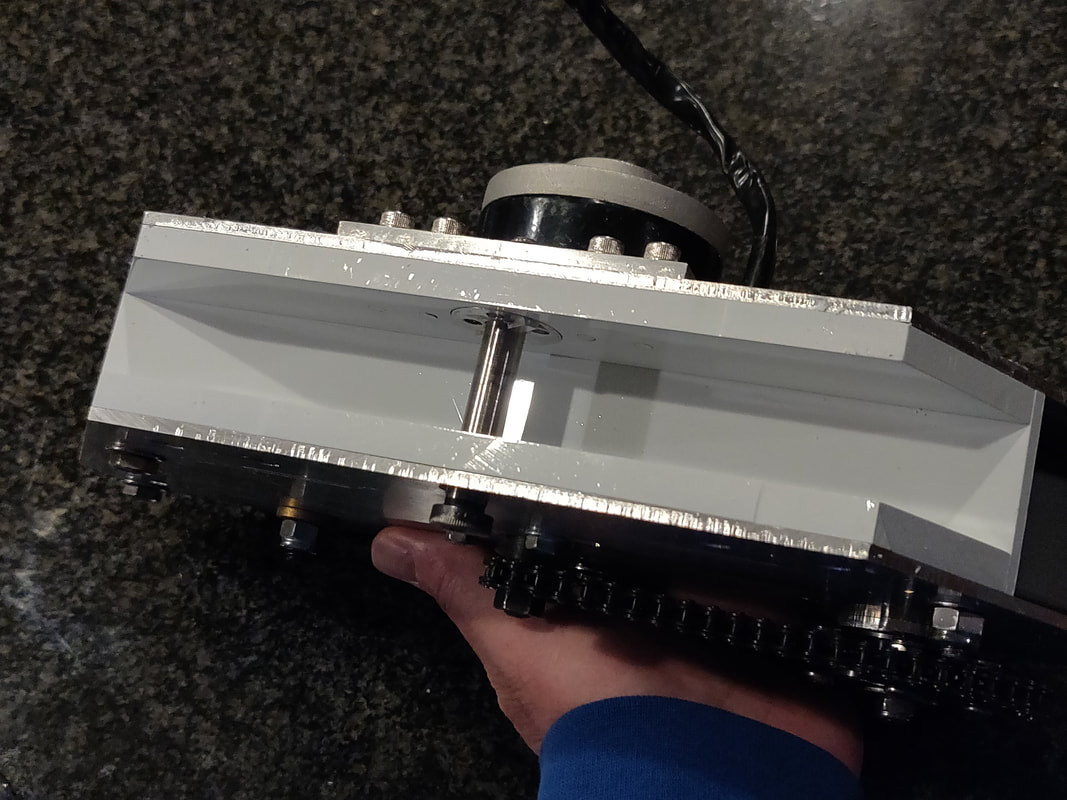
Recently, due to R2's increased weight, I redesigned the drives and this time built them from aluminum.
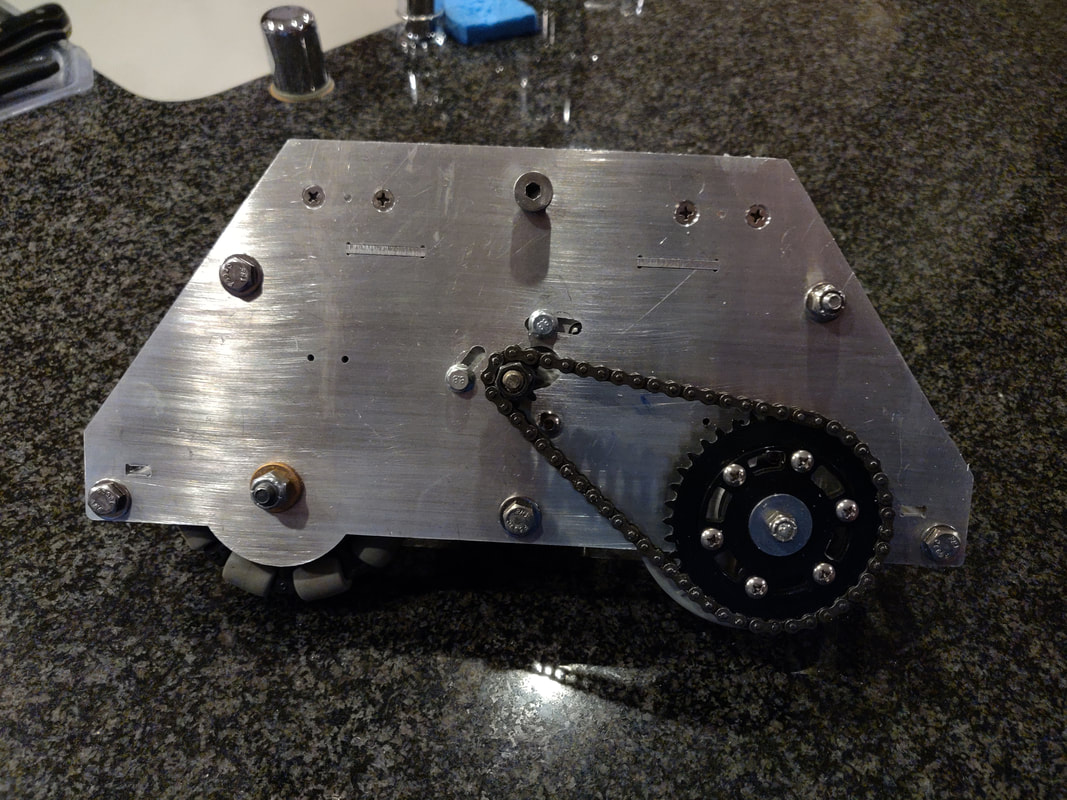
The new drives are much stronger and have drive wheels that are twice as wide.