|
I'm going to keep this section brief as electronics are COMPLICATED and most folk won't care exactly how everything works. R2's electronics are constantly changing as I add new features and change programming so this page is probably already out of date. That said, it will give you a general idea of what it takes to animate a Droid!
|
|
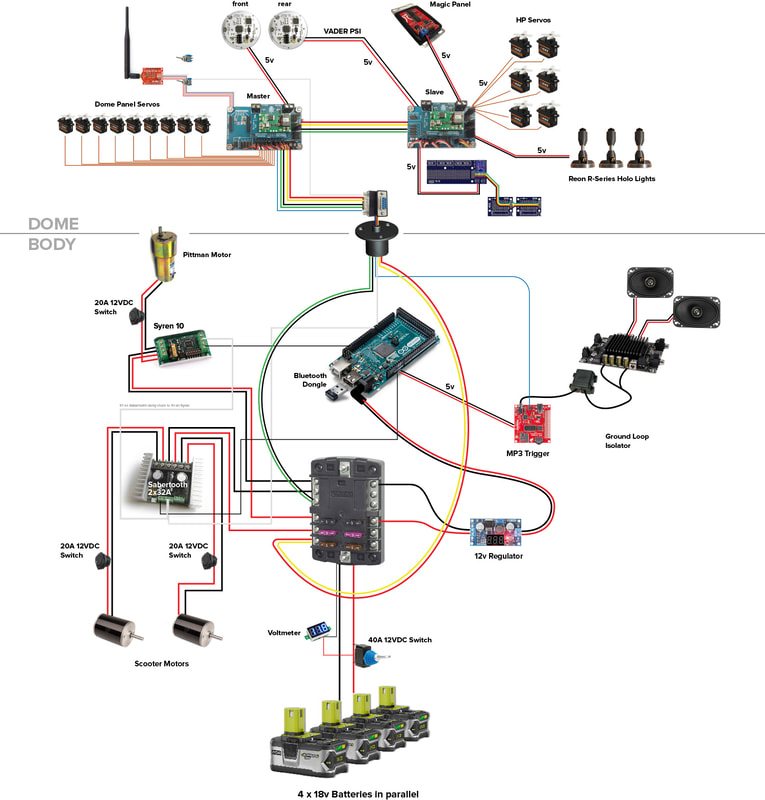
Here's a diagram of the major portions of R2's electronics. This does not include any of the 2-3-2 system electronics as they are completely separate for safety reasons. Basically, R2 is powered by four 18 volt lithium ion cordless tool batteries. His foot drives and the motor that drive his dome both have their own drivers, that are in turn controlled by an Arduino Mega ADK. What's an Arduino, you ask! They're small micro controllers, essentially tiny, simple computers that you can program to do lots of things. R2 has, thirteen of them at last count! Arduinos are a ton of fun. You should look them up!!! Now, back to the electronics. The Mega ADK also communicates with the master and slave micro controllers in the dome, sending commands that initiate movement, sound and light sequences. I send commands from a hand held remote via bluetooth to the Mega ADK. The master in the dome is also connected to a sound system including a 150 watt amplifier and speakers for sounds and music. You might notice that there is a second WIFI receiver attached to the master micro controller. This provides me with optional controls though an iPhone app developed by another builder.
|
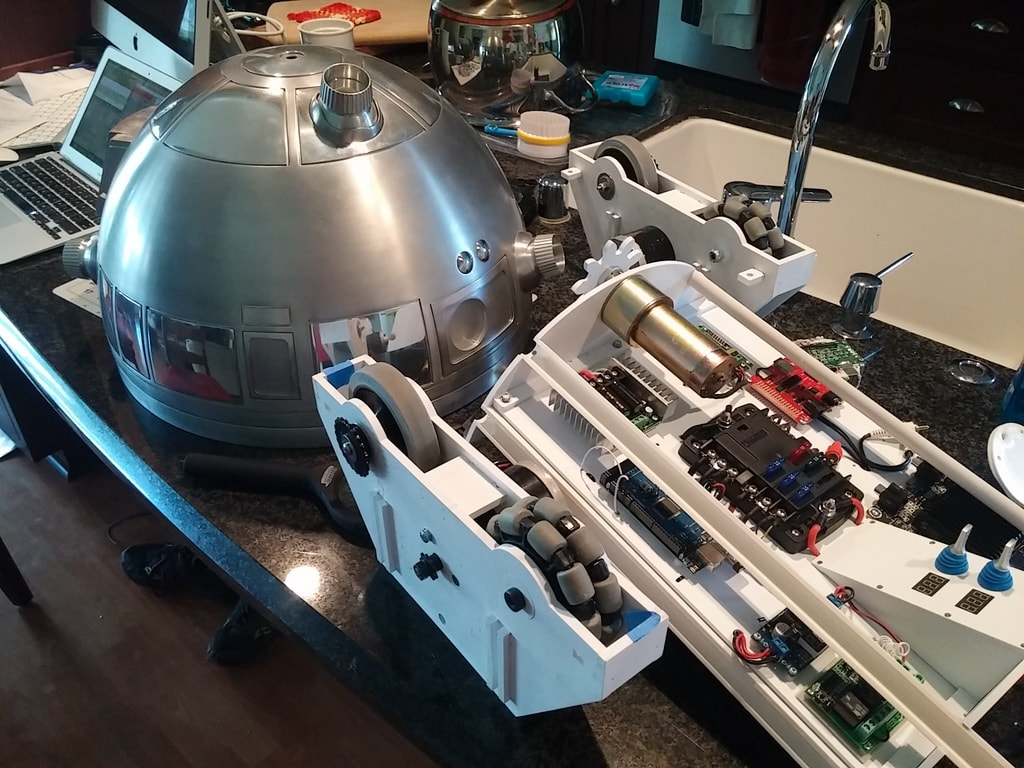
This board, which contains most of the body electronics is removable for maintenance. The slides that I've used here came from Frank.

Here's a photo from when I was testing the electronics before installing them in the body. It was pretty funny to have R2's guts moving and beeping on the kitchen counter!
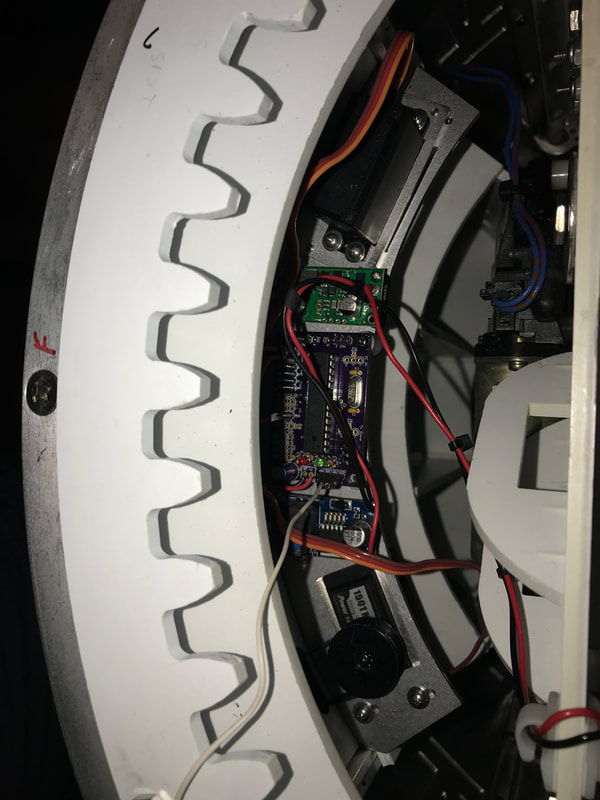
In addition to the main electronics board, there are several smaller modules that control other functions or are just for show. This is the section that controls R2's utility arms. Their function is controlled by a micro controller that is also linked to the Mega ADK.
As I said, some of R2's electronic are just for fun, like his "Data Panel" for instance. It is just a set of cool blinky lights that shows when R2 opens one of his front panels. There are peak meters on it that move in response to the sounds he is making as well.
The 2-3-2 control electronics are completely separate from the rest of his systems. This is to minimize the chance that it could accidentally be tripped, and because I wanted the 2-3-2 to still work when I had the main control board removed so I could do maintenance. The transitions are controlled by another Arduino Mega running a program I wrote myself. Four motor controllers drive the shoulder, center leg and ankle motors. More information on the 2-3-2 system is located on the 2-3-2 page.
